LIght Detection And Ranging
We aimed at developing a low-cost, robust lidar, improving the existing products in the aspects of transmission accuracy, power supply mode and blind spots elimination.
Optical Ranging System
- We use linear CCD and triangulation to measure distance. The sketch of the optical path is shown below.
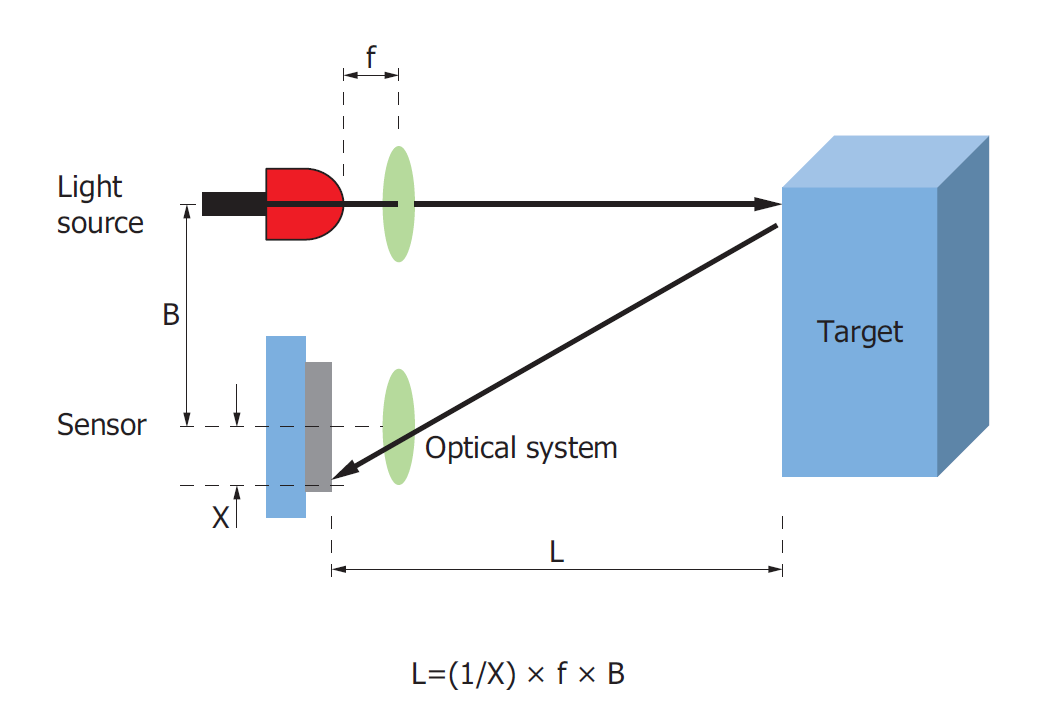
- The range to the obstacle can be described as:
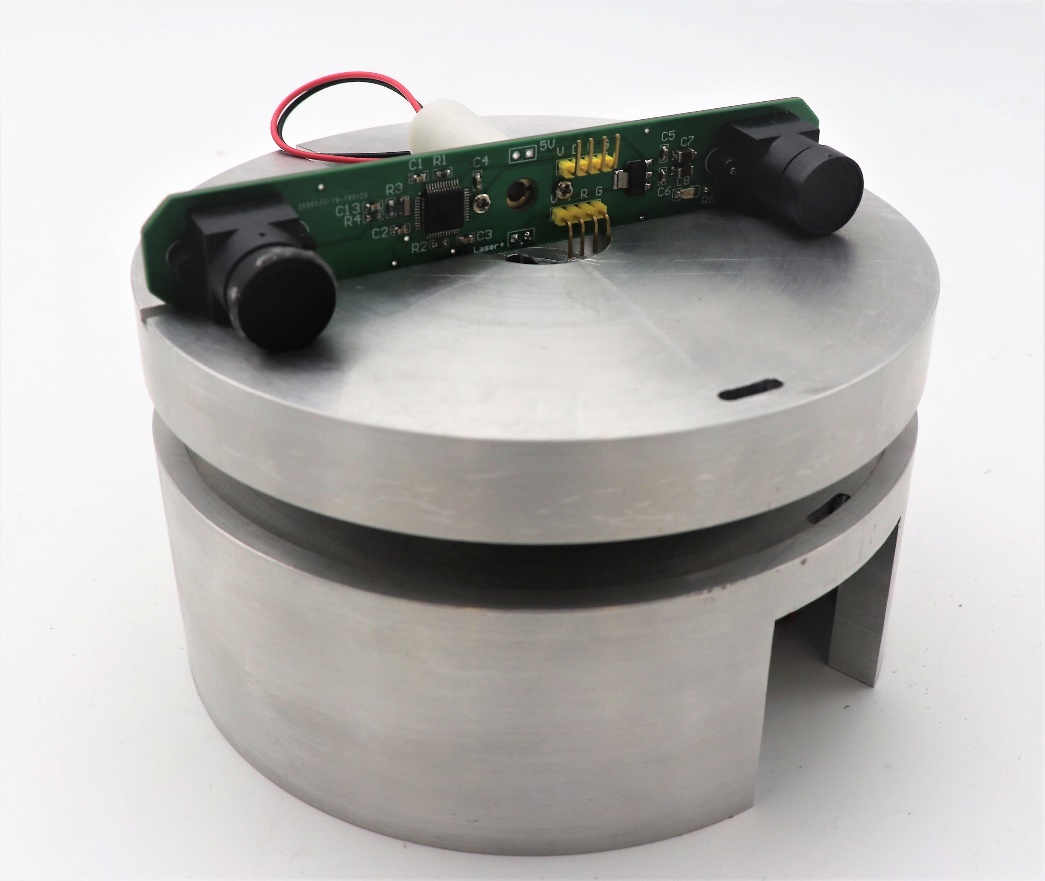
Mechanical System
The mechanical system is mainly divided into two parts, rotor and stator. The motor is fixed in the stator and electric spindle scheme is applied.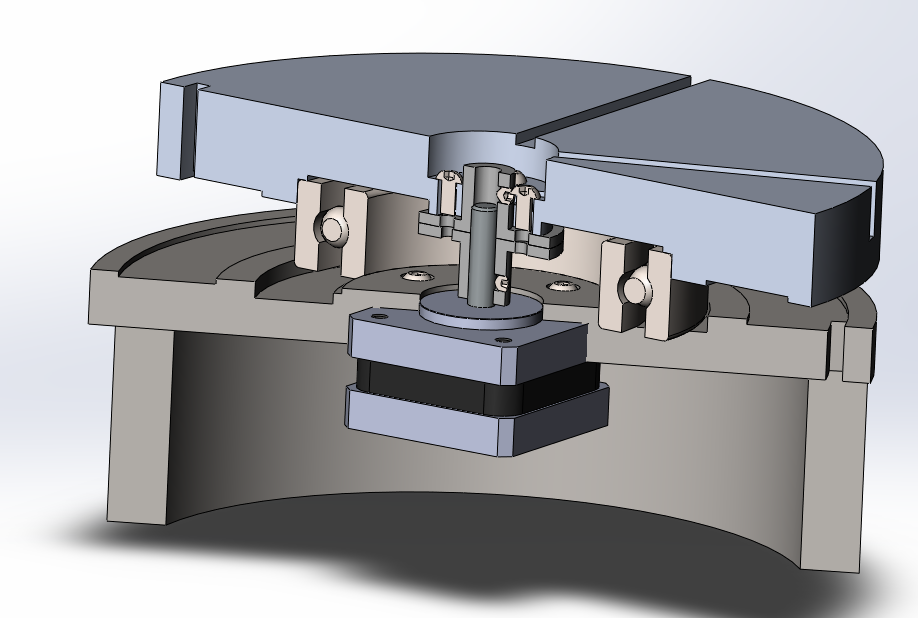
Circuit and Communication System
- The circuit board on the rotor supplies the power of laser and supports the ranging system.
- The PCB on the stator supplies the motor and the wireless power supply module, which supplies the power of the rotor PCB. The stator PCB is also responsible for receiving the data from the rotor and transmitting the ranging data and angle data to the upper computer.
- A PC software was also developed with the serial package of Python, which can plot the collected data in a polar coordinate system.