Modeling and Control Strategy of Surface Adaptive Exploration of Mechanical Finger
- This is my bachelor thesis project.
- The source code of my simulation platform along with the controllers could be found on my github page.
Introduction
- Surface Adaptive can be defined as human/robot fingers sliding along the surface of an object without leaving the surface, and controlling the contact force at the same time. However, the robot fingers are not as adaptive as human fingers. In this project we want to endow the mechanical finger some adaptive ability to some surface.
- Since the pandemic in 2020, I was locked at home, canceling all the experiments and focusing on simulation.
- I first established the kinematic and mechanic models of the mechanical finger, and then built the simulation platform with those models.
- I applied PID controller to the finger to execute haptic exploration and tooling tasks, and applied compliance controller for surface follow-up task.
Modeling
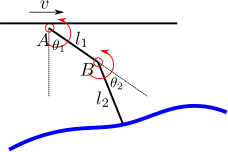
The finger was modeled as a two-link system, with the base moving horizontally at a constant speed, and the tip contacting with the surface.
A simulation platform was written in ROS, which simulate the sliding process of the mechanical finger.
Controller
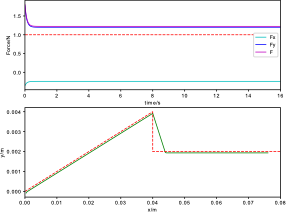
A PID controller was applied to the contact tooling task.
A compliance controller was applied to the surface exploring task.